


Drones – hoe werken ze?
Ahhhh laten we het eens even een keertje over mijn andere hobby hebben. Drones! Drones zijn rete cool! Waarom? Omdat ze vliegen en je ze kunt besturen natuurlijk. Nee serieus, drones zijn fantastisch. Ik werk pas een half jaartje met drones dus ik ben nog helemaal geen pro. Maar wat is het machtig mooi om overal naartoe te kunnen vliegen zo vrij als een vogel. Het haantje van de kerktoren bekijken? Sure! Over een groot meer vliegen? No problem! Je huis van 100 meter hoogte fotograferen? Kinderspel! In deze post ga ik jullie vertellen wat drones zijn en hoe ze werken.

Een drone is een zogenaamde UAV (Unmanned Aerial Vehicile) voertuig ofwel een “onbemande luchtvaartuig. Een drone is onderdeel van de UAS (unmanned aircraft system) familie. Onder deze familie vallen alle apparaten die zich onbemand voortbewegen in de lucht. Een gestuurde bom is dus een UAS maar geen drone. Om te classificeren als drone moet het apparaat herbruikbaar zijn en dus terugkeren naar een basis. Een commerciële drone zoals wij die kennen is voornamelijk herkenbaar aan de “4 poten” met ronddraaiende propellers maar kent ook andere varianten. Drones worden voornamelijk gebruikt voor militaire toepassingen en hier lijken ze veel meer op vliegtuigen maar dan zonder bemanning. Het voordeel van een drone is dat deze het leven van zijn piloot niet op het spel zet (zeker binnen conflict- en oorlogsgebieden). Een drone wordt bestuurd m.b.v. een afstandsbediening. Sommige drones kennen een auto-pilot functie waarbij een vooraf geprogrammeerde route kan worden gevlogen zonder manuele interruptie. Als Nederlanders de drone hadden uitgevonden hadden ze hem waarschijnlijk geen “drone” maar “dar” genoemd. Een drone is namelijk vernoemend naar een mannetjes bij en in het Engels is dat een “drone”.
Drones bestaan al langer dan wij vaak denken. Drones bestaan al sinds 1911 en worden sinds die tijd gebruikt voor oorlogsvoering. Pas de laatste jaren worden drones meer “mainstream” en kunnen ook particulieren een drone kopen. Ten tijde van de eerste wereldoorlog ontwikkelde de US onbemande “air torpedoes”. Dit zijn de allereerste drones. Voor die tijd (+/- 1850) werden ballonnen gevuld met bommen maar omdat die niet bestuurbaar zijn v.a. de grond tellen deze niet als drone. In de 2e wereldoorlog werden remote-controlled bommenwerpers ingezet (B-24).

De techniek liet toen echter nog vaak te wensen over en veel drones crashte of bereikte hun doel niet. Amerika zou in de jaren na de tweede wereldoorlog hard innoveren om de drone techniek te verbeteren. In 2013 gebruikte minimaal 50 landen drones in het leger. Drones worden tegenwoordig ook ingezet voor andere gevaarlijke klussen zoals het bekijken en analyseren van bosbranden en stromen (zoals wervelwinden).
We kennen 6 verschillende soorten UAV’s:
- Target and Decoy – Drones fungeren hier als doelwit.
- Reconnaissance – Ter verkenning van (oorlogs)gebieden.
- Combat – Hier bieden bewapende drones aanvalsmogelijkheden voor missies met een hoog risico (Unmanned Combat Aerial Vehicle – UCAV).
- Logistiek – Het bezorgen van pakketten en andere cargo.
- Research and development – Het verbeteren van UAV-technologieën.
- Civil and Commercial – Voor particulier gebruik zoals voor de landbouw, luchtfotografie en gegevensverzameling.
Verder kun je drones onderverdelen op basis van hun range en hoogte:
- CIS Lunar – Transport tussen de aarde en de maan.
- Orbital Low Earth Orbit – Ruimtevaart (mach 25+)
- Hypersonic High-Speed, Supersonic en Hypersonic – hoogte: 15000+ meter – range: 200+ km
- HALE (High Altitude, Long Endurance) – hoogte: 9100+ meter – range: 1000+ km
- MALE (Medium Altitude, Long Endurance) – hoogte: 9000+ meter – range: 200+ km
- Tactical – hoogte: 5500+ meter – range: 160+ km
- NATO Type – hoogte: 3000+ meter – range: 50+ km
- Close – hoogte: 1500+ meter – range: 10+ km
- Handheld – hoogte: 600+ meter – range: 2+ km
Drones zoals we die kennen voor commercieel gebruik vallen dus binnen de laagste klasse, ofwel de “Civil & Commercial Handheld Drones”. De meeste van deze drones hebben een maximale altitude van 500 meter met een maximale range van 5 km. Civiele drones worden naast particulier gebruik ook veel ingezet door brandweer en politie voor b.v. opsporingen en terreinbeveiliging. Wanneer we het in deze post verder over “drones” hebben dan hebben we het over de particuliere (“Civil & Commercial Handheld”) drones.
Wanneer particulieren het gaan gebruiken zijn er natuurlijk regels. Het kan natuurlijk ontzettend gevaarlijk zijn om “iets” zomaar de lucht in te sturen. Een drone kan ergens tegenaan crashen of potentieel uit de lucht vallen en iemand verwonden. Een drone kan het luchtverkeer verstoren en drones met camera’s kunnen een inbreuk hebben op de privacy van mensen. Op de Rijksoverheid websiteRijksoverheid website is veel informatie te vinden over het vliegen met drones. In essentie zijn dit de Nederlandse regels. Echter kent ieder land (of iedere individuele staat) zijn eigen regels dus zorg dat je op de hoogte bent voordat je zomaar ergens gaat vliegen.
- Je mag niet vliegen in het donker.
- Je mag niet boven een mensenmenigte vliegen.
- Je mag geen opnames maken van mensen (als deze herkenbaar zijn) zonder goedkeuring. Zo mag je ook nooit vliegen bij ongelukken of andere “crime” gebieden.
- Je mag niet vliegen bij aaneengesloten bebouwing zoals woonwijken.
- Je mag niet vliegen in de buurt van een vliegveld.
- Je mag niet vliegen boven een industriegebied.
- Je mag niet vliegen binnen aangegeven no-fly zones.
- Je mag de openbare orde niet verstoren
- Je moet voorrang verlenen aan ALLE andere luchtvaartuigen.
- Je moet als bestuurder altijd je drone kunnen zien en je mag dus niet vliegen alleen op basis van videobeelden en andere sensoren.
- Je drone mag niet zwaarder zijn dan 25 kilo.
- Je mag nooit meer dan 120 meter boven de grond of het water vliegen.
In de basis komt dit neer op het feit dat je alleen mag vliegen in het buitengebied en mag je geen mensen ongevraagd fotograferen. Wanneer je al particulier vliegt heb je geen vergunning nodig om te vliegen. Wanneer je een drone inzet voor zakelijke doeleinden is er wel een vergunning nodig zoals een vliegbrevet, bewijs van luchtvaardigheid of ROC (RPAS Operator Certificate). En overtreed je een van bovenstaande regels dan kan de boete oplopen tot € 7800. Meestal krijg je als particulier eerst een waarschuwing.
Drones zijn er in vele soorten en maten. We categoriseren drones vaak op basis van het aantal propellers (die we ook wel “blades” noemen wanneer het “losse” bladen zijn).
- Monocopter – 1 propeller (meestal met cockpit en geen losse blades)
- Bicopter – 2 propellers (meestal met cockpit en geen losse blades)
- Quadcopter – 4 propellers of blades
- Hexacopter – 6 propellers (meestal blades)
- Octocopter – 8 propellers (meestal blades)

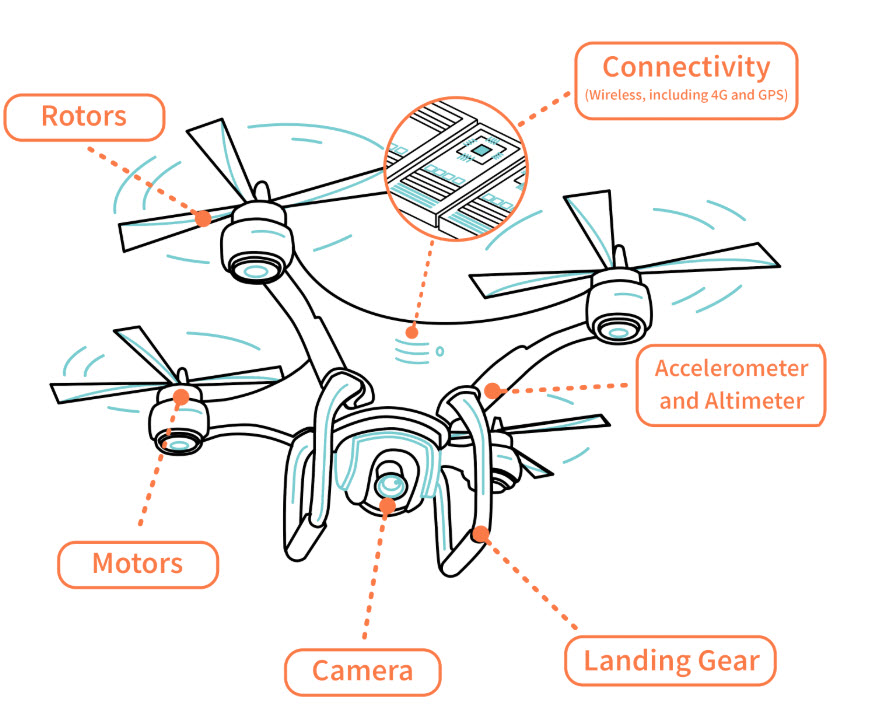
Drones beschikken naast de propellers over de volgende belangrijke onderdelen:
Body:
De body van een drone bestaat meestal uit een solide behuizing zonder cockpit. In de behuizing bevind zich alle elektronica van de drone. Bij sommige drones is de behuizing waterdicht maar bij de meeste particuliere modellen is dat niet het geval.
Voeding / Power Supply:
Om een drone aan te sturen is stroom nodig. Kleinere drones beschikken meestal over een accu (lithium-polymer) terwijl de professionele drone vliegt op basis van benzine.
Computerunit:
Een belangrijk stukje elektronica van de drone is de “computerunit”. Deze computerunit zorgt ervoor dat de propellers op de juiste manier worden aangestuurd, de sensoren uitgelezen worden en de input van de afstandsbediening verwerkt wordt. Deze hardware noemen we ook wel de Flight Controller (FC), het Flight Controller Board (FCB) of de Autopilot.
Sensoren:
Een drone zou niet kunnen vliegen zonder sensoren. Uiteraard bevinden zich op een drone verschillende sensoren en dit verschilt per drone. Maar de belangrijkste die vrijwel altijd aanwezig zijn, zijn de position sensor (GPS), movement sensor (in welke directie beweegt de drone zich en hoe snel), altimeter (op welke hoogte vliegt de drone). Uiteraard zijn er ook sensoren die “water” detecteren, objecten waarnemen en de hoogte registreren. Sensoren die externe informatie (buiten de drone) verwerken noemen we als verzamelnaam Exteroceptive Sensors en sensoren die ervoor zorgen dat externe informatie juist geregistreerd en verwerkt wordt noemen we Exproprioceptive sensoren. Het aantal sensors wordt vertaald naar een DOF (Degrees Of Freedom) waarde. 6 DOF impliceert 3-assige gyroscopen en versnellingsmeters (IMU), 9 DOF verwijst naar een IMU plus een kompas, 10 DOF voegt hieraan een barometer toe en 11 DOF voegt meestal een GPS-ontvanger toe.
Actuators:
De UAV-Actuators is een digitale elektronische snelheidsregelaar welke het toerental van de motoren regelt welke gekoppeld zijn aan de propellers terwijl andere actuators het toerental regelen voor de servomotoren (meestal voor vliegtuigen en helikopters), leds en luidsprekers.
Camera / Gimbal:
Sommige drones, en zeker die van de hobbyisten zijn voorzien van een camera. Met deze camera kunnen prachtige luchtbeelden genomen worden en kan de vlucht via het scherm nauwlettend gevolgd worden waardoor het potentieel mogelijk is om gecontroleerd te vliegen als het toestel niet meer zichtbaar is (let op, dit is in Nederland verboden, her toestel moet altijd zichtbaar zijn voor de bestuurder). Om de camera te kunnen bewegen en stabiel te houden wordt vaak gebruik gemaakt van een gimbal. De gimbal zorgt ervoor dat de camera altijd recht is. Een gimbal kan bestaan uit 2 of uit 3 assen om horizontale en verticale bewegingen te corrigeren. Dit noemen we ook weleens een “cardanische ophanging” van de camera.
Accessoires:
Drones zijn uit te rusten met verschillende accessoires. Denk maar aan “blade protectors”, additionele camera’s, propeller guards (om de blades te beschermen), landing gear, lens hoods, filter sets etc. Hou er rekening mee dat extra accessoires ook extra gewicht veroorzaken. Als je niet de juiste accessoires bevestigd kan de drone instabiel worden en al het extra gewicht heeft een negatief effect op de batterijduur en vaak ook de hoogte en afstand die behaald kan worden.
Controlling Unit:
Een drone bestaat naast het apparaat eveneens uit een afstandsbediening of ander type remote control waarmee de drone v.a. de grond bestuurd kan worden. Het signaal tussen de controlling unit is een belangrijke factor in de afstand die een drone kan afleggen. Meestal gaat het radiosignaal over de 2.4 GHz bandbreedte en dus wordt vaak WiFi gebruikt als communicatiesignaal. Maar ook worden vaak varianten hierop gebruik om verstoring te voorkomen zoals Auxiliary, Lightbridge, MAVLink en OcuSync. Hetzelfde signaal wordt eveneens gebruikt voor de overdracht van videobeelden en andere telemetrische signalen. Vroeger beschikte drones alleen over een enkele uplink om besturing te faciliteren. Later werd daar een narrowband downlink aan toegevoegd om ook signalen van de drone te ontvangen. Tegenwoordig gebruiken drones 1 enkele broadband link voor al deze signalen. De signalen voor het besturen van een drone komen overigens niet altijd direct van de control unit af. Zo kan een andere luchtvaartuig als relay fungeren om een verder bereik te behalen of geschied de besturing middels een satelliet zodat een nog veel groter bereik mogelijk is.
Moderne drones beschikken over veel meer computergestuurde apparatuur en dus zal de drone in sommige mate bestuurd worden door de computer en niet door de piloot. Denk hierbij aan het behouden van positie als de piloot geen input geeft (self-level), stabilisatie, landen, opstijgen, ontwijken van objecten, navigatie, auto programma’s en acrobatische manoeuvres etc.
Er bevind zich dus heel veel technologie in een drone. Deze luchtacrobaten zouden zonder deze technologie onbestuurbaar zijn of zou je er in ieder geval veel meer moeite mee hebben. Wanneer je betrokken moet zijn bij elk proces van het toestel gedurende de vlucht lijkt het meer op het vliegen met een helikopter. Drones hebben een bepaalde autonomie welke met name veroorzaakt wordt door de verschillende rotoren waar ze over beschikken. Veel vliegtuigen en helikopters beschikken over 1 of 2 rotors met 1 of meerdere propellors. Drones beschikken al snel over meerdere rotoren waaraan meerdere blades bevestigd zijn. Een veel voorkomend design bestaat uit 4 rotors met aan elke rotor 2 blades (quadcopter). Het voordeel van meerdere rotors is dat er gedurende de vlucht 1 uit mag vallen. De overige rotors kunnen dan samenwerken om de drone veilig aan de grond te brengen. Daarnaast genereren de rotors ook de opwaartse kracht. Hoe meer rotors, des te meer gewicht de drone kan dragen. Daarnaast zorgen meer rotors ervoor dat de blades kleiner gemaakt kunnen worden wat resulteert in een handzaam model drone.
Drones gebruiken rotors dus voor de voortstuwing van het toesten en het behouden van de controle. Je kunt een rotor zien als een ventilator omdat deze vrijwel hetzelfde werken. De draaiende bladen van de rotor duwen de lucht naar beneden. Omdat een kracht naar 1 kant altijd een tegengestelde kracht heeft naar de andere kant betekent dit dat de lucht die omlaag geduwd wordt terugkomt en de rotors omhoog duwt. Dit heeft alles te maken met opwaartse en neerwaartse kracht. Hoe sneller de rotors draaien, hoe groter de lift en vice versa.
Met deze krachten kan een drone drie dingen doen in het verticale vlak: zweven (blijven hangen), klimmen of afdalen. Om te zweven, moet de netto stuwkracht van de (vier) rotoren die de drone omhoog duwen gelijk zijn aan de zwaartekracht die hem naar beneden trekt. Bij het omhoog klimmen van de drone is het zaak om de stuwkracht (snelheid) van de vier rotoren omhoog te brengen zodat er meer opwaartse dan neerwaartse kracht ontstaat. Bij het afdalen van de drone is dit exact andersom. Bij het afdalen zullen de blades minder snel gaan draaien waardoor de zwaartekracht hoger wordt dan de stuwkracht. Er spelen hier 3 onderdelen een rol. Het gewicht van de drone, de geleverde stuwkracht en de luchtweerstand. Misschien dat het landen van een drone wel de grootste uitdaging is. Drones zijn geprogrammeerd om automatisch langzaam te landen. Want als er te snel afgedaald wordt dan ontstaat er een effect dat bekend is bij helikopterpiloten. Dit noemen we de zogenaamde “vortexringstaat”. Als drones te snel afdalen komen ze terecht in de ronddraaiende neerwaartse krachten van hun eigen propellers. Er ontstaat dan een luchtvacuüm waaruit het lastig is om te ontsnappen. Dit komt omdat, wanneer er gas gegeven wordt om te ontsnappen er nog een sterker vacuüm gecreëerd wordt waardoor de neerwaartse trekkracht nog hoger wordt.
Om wendbaar te zijn in de lucht moet een drone ook kunnen draaien. En dit is waar het nog iets ingewikkelder wordt. Stel dat je een zwevende drone hebt welke naar het noorden gericht is en deze wil je 90 graden naar het oosten draaien zonder in hoogte te veranderen. Laten we eerst eens kijken naar een schets van de 4 rotors in dit voorbeeld:
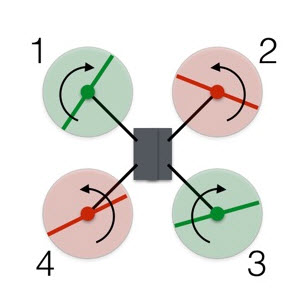
Bij deze drone draaien de rode rotors linksom en de groene rotors rechtsom. We hebben dus 2 sets van rotoren welke in tegengestelde richting draaien om de drone recht te houden. Wanneer ze allemaal dezelfde kant op zouden draaien dan zou de drone nooit recht kunnen zweven. De drone zou dan alleen maar rondjes blijven draaien en stijgen. Omdat deze twee sets aan rotoren de drone op hetzelfde punt in de lucht houden zeggen we dat het impulsmoment hier “0” is. Het impulsmoment is vergelijkbaar met het zogenaamde “lineair momentum” wat wil zeggen dat de massa van het product (het gewicht) vermenigvuldigd met de snelheid nu 0 is en dus blijft de drone op dezelfde plek. Om nu naar het Oosten te bewegen moeten we gaan draaien. Hier komt de term “traagheidsmoment” om de hoek kijken. Het traagheidsmoment is vergelijkbaar met de massa, behalve dat het gaat om rotatie (de luchtdruk die zijwaarts gegenereerd moet worden om te kunnen draaien). Door de hoeksnelheid te vermenigvuldigen met het traagheidsmoment kan de drone gecontroleerd naar het Oosten draaien omdat hij nu weet welke propeller minder snel moet draaien om die rotatie te maken. Dat is nog best ingewikkeld toch. Ik zal het makkelijker uitleggen. De rode links roterende propellers zijn een setje en elke propeller is +2 punten waard (positieve rotatie naar de ene kant). Bij de groene, rechts roterende propellers is dat hetzelfde verhaal maar hier is elke propeller -2 punten waard (negatieve rotatie naar de andere kant). Om recht te blijven moet het impulsmoment dus constant blijven (0). Dat is makkelijk. +2 + +2 + -2 + -2 = 0.
Stel dat we nu de drone naar rechts wilt draaien dan moeten we de hoeksnelheid (waarde) van 1 rotor te verlagen zodat deze nu een impulsmoment van -1 heeft in plaats van -2. Het totale impulsmoment van de drone is nu +1 (+2 + +2 + -2 + -1 = +1). Dat kan natuurlijk niet (krachten zijn altijd evenredig) En dus zal de drone met de klok mee gaan draaien om de kracht te compenseren. De body van de drone krijgt nu een impulsmoment van -1 waardoor de totale waarde weer nul is. Op deze manier ontstaat rotatie. Maar als het op dit punt nog allemaal een beetje duidelijk is dan weet je ook dat wanneer de snelheid van een rotor verlaagd worden ook de stuwkracht van deze rotor verminderd. De netto opwaartse kracht is niet meer gelijk aan de zwaartekracht en dus zal de drone gaan dalen. Maar wat nog erger is, is dat de stuwkrachten niet meer gebalanceerd zijn waardoor de drone naar beneden zal kantelen in de richting van rotor 1. Dus om een drone te kunnen laten draaien zonder andere problemen te veroorzaken wordt niet de spin van alleen rotor 1 maar de spin van rotor 1 en 3 verlaagd en de spin van rotor 2 en 4 verhoogd (+3 + +3 + -1 + -1 = +4). Hiermee blijft de stuwkracht gelijk aan de zwaartekracht en zal de drone niet kantelen omdat hij in balans blijft. Daarom staan de linksdraaiende en rechtsdraaiende rotors ook diagonaal tegenover elkaar. Maar het impulsmoment van de rotors is echter niet meer gelijk aan 0 en dus zal de drone alsnog draaien.
Het draaien van een drone is misschien wel het meest ingewikkelde onderdeel. En als je dat begrepen hebt dan weet je misschien ook wel waarom een drone zo gemakkelijk vooruit, achteruit en zijwaarts kan bewegen. Er is namelijk geen verschil in de techniek die hiervoor gebruikt wordt. Een (quadcopter)drone is symmetrisch en dus kan elke kant de “voorkant” zijn. Dit heeft alles te maken met de rotor die op dat moment de voorwaartse stuwkracht moet leveren. Stel dat een drone met constante snelheid vliegt dan ziet het zijaanzicht er als volgt uit:
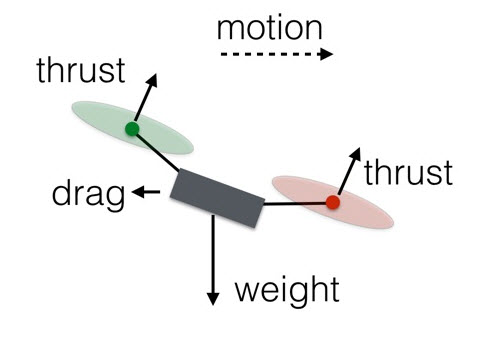
Zoals we net gezien hebben zal bij een zwevende drone de rotatiesnelheid van rotors 1 en 3 hetzelfde zijn als die van rotors 2 en 4. De totale stuwkracht is dan gelijk aan het gewicht + zwaartekracht. Om naar een specifieke kant te bewegen worden de rotors op 1 lijn gebruikt (1 en 2, 2 en 3, 3 en 4 of 4 en 1). Stel je voor dat we de rotatiesnelheid van 1 en 2 verhogen dan zal het impulsmoment gelijk blijven en dus zal de drone op hetzelfde verticale niveau blijven (+3 + +2 + -2 + -3 = 0). Er ontstaat nu wel een grotere kracht aan de kant waardoor de drone niet 100% vertikaal kan blijven. De drone zal licht kantelen waarbij de kant van rotoren 3 en 4 omlaag gaat. Hierdoor ontstaat er een lichte toename van de stuwkracht op rotoren 1 en 2 waardoor de drone zich vooruit zal bewegen in de richting van rotoren 3 en 4.
Zoals je kunt lezen komt er veel techniek in de vorm van sensoren en boordcomputers bij kijken om de drone altijd netjes door de lucht te laten bewegen. Elke beweging die gemaakt wordt is een berekening en een dynamische aandrijving van de rotors. Er zijn ook nog vele andere technieken die moderne drones gebruiken. Zo zijn veel drones uitgerust met ultrasone sensors en/of een naar beneden gerichte camera aan de onderkant van de drone waardoor de drone een beeld van het grondoppervlak kan maken. Deze informatie kan weer gebruikt worden door het (visueel) positioneringssysteem om te landen. Deze zelfde technieken worden gebruikt door drones om objecten te ontwijken of om specifieke zaken te kunnen volgen.
De techniek van drones is de laatste jaren ontzettend snel gegaan en zal de komende jaren evalueren zodat er drones ontstaan die nog veiliger kunnen vliegen zonder overig vliegverkeer te hinderen en waarbij het bijna onmogelijk is om te crashen. De batterijduur zal toenemen en ook de kracht van de rotors zal toenemen. We zullen drones gaan zien voor zakelijke doeleinden en wellicht ooit voor personenvervoer. Drones vormen een eigen categorie binnen het luchtverkeer welke in de toekomst veiliger en duurzamer zal zijn dan de vliegtuigen die we nu kennen! Mooie technieken en vooral een prachtige hobby.

Vond je het leuk om eens een artikel over drones te lezen op mijn blog? Heb je er iets van opgestoken of zou je graag een vervolg hierop zien? Like dan s.v.p. dit bericht en post het verder op je eigen sociale media of website. Leuke reacties zorgen voor nog meer enthousiasme om nieuwe kwalitatieve posts te schrijven. ★ Alvast enorm bedankt! ★